
02. ROS 기초 명령: Turtlesim & Node
🐢 01. Intro
: 안녕하세요, 삐약은지입니다 🙂
오늘은 앞으로 저희가 ROS2를 이해하기 위해 사용할 친구인 Turtlesim과
ROS2에서 반드시 알아야 할 핵심 개념인 Node에 대해 알아보도록 하겠습니다

🐢 02. Turtlesim 이란?
: ROS에서는 유독 거북이를 자주 사용하곤 하는데요 🙂
이 거북이들을 활용해 만든 재미있는 시뮬레이션 패키지가 바로 Turtlesim입니다
Turtlesim은 ROS의 기본 명령어와 핵심 개념을 익히기에 매우 유용한 도구입니다
따라서 앞으로 ROS2를 이해하는 과정에서 저희도 Turtlesim을 활용해 실습을 진행해 보겠습니다

🐢 03. Node 란?
: 실습에 앞서 우선 Node에 대해 알아야 하는데요 🤔
Node란 ROS에서 실행 가능한 최소 단위로,
쉽게 말하면 하나의 기능을 담당하는 작은 프로그램입니다
예를 들어 빵을 만든다고 가정해보겠습니다
빵집에는 빵을 만드는 사람도 있고, 빵을 판매하는 사람도 있을 것입니다
이때 이 각각의 사람들이 ROS에서는 소위 작은 프로그램(Node)으로,
빵을 만드는 프로그램(Node)과 빵을 판매하는 프로그램(Node)으로 생각해볼 수 있습니다
저희가 ROS를 배우는 궁극적인 이유는 로봇을 다루기 위함입니다
따라서 로봇 시스템에서는 여러 개의 Node들이 서로 상호작용하며,
하나의 전체 시스템을 구성한다고 이해하시면 됩니다 🙂
(TMI) Node에서 사용하는 단위는 mks로
mks는 각각 meter, kg, sec를 의미합니다
추가로 각도는 radian을 사용합니다
🐢 04. Turtlesim & Node (1)
: 저희는 이제부터 Turtlesim을 실행해보도록 하겠습니다
Turtlesim은 여러개의 Node로 구성된 Package로,
저희가 학습을 위해 사용할 Node는 turtlesim_node입니다
그런데 Node를 어떻게 실행하는 것일까요 ?
Node는 ros2 run을 통해 실행할 수 있습니다
ros2 run <pkg name> <node name>
이제 turtlesim_node를 실행해볼까요 ?
아래와 같이 입력해주시면 됩니다
ros2 run turtlesim turtlesim_node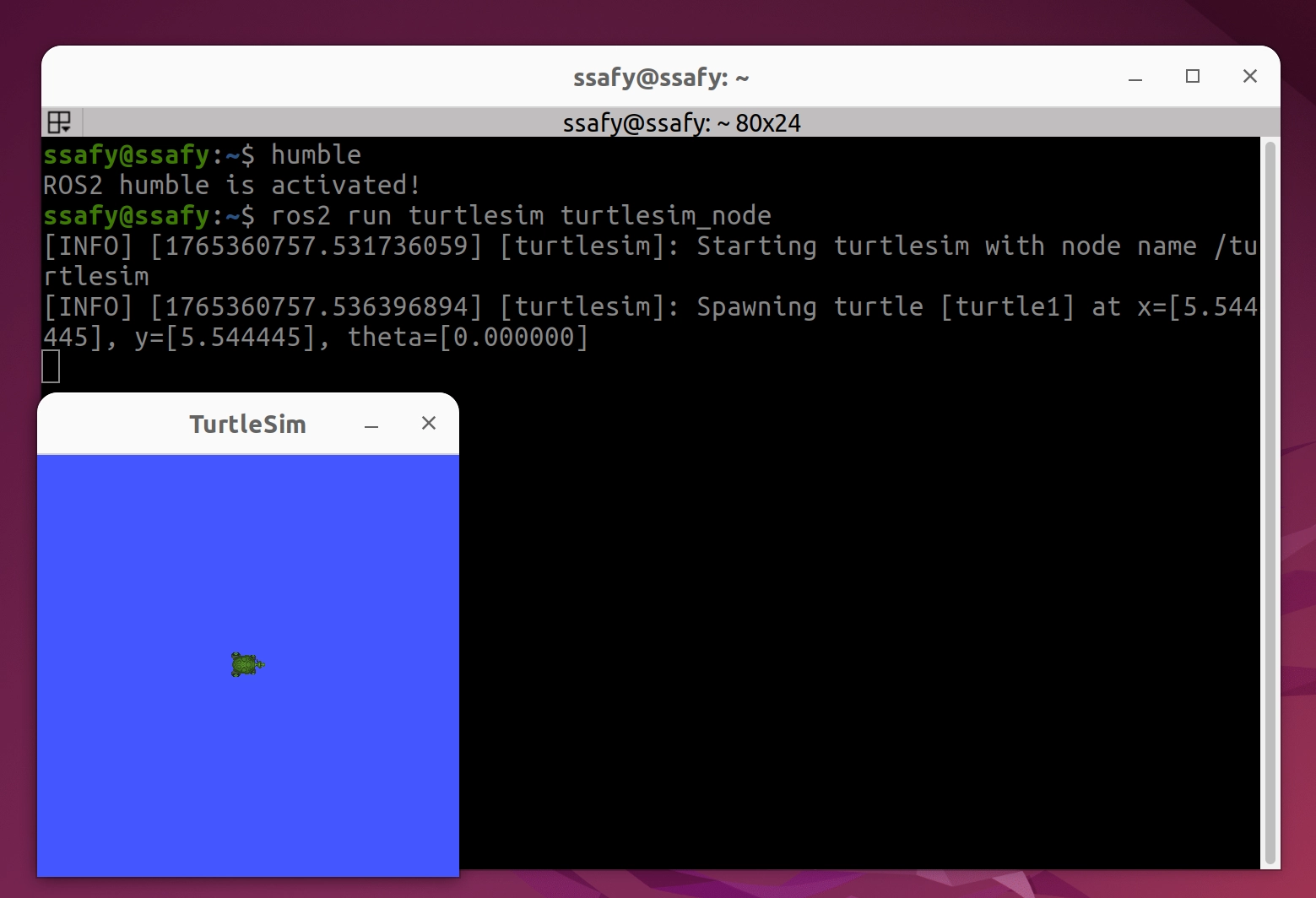
🐢 05. Turtlesim & Node (2)
: Node는 다양한 기능을 제공하는데요 !
오늘은 그중에서도 대표적인 두 가지 명령어를 알아보겠습니다
① ros2 node list
② ros2 node info /<node name>
이때 “04. Turtlesim & Node (1)”은 실행해 둔 상태에서
새로운 터미널을 하나 더 열어주세요 🙂
ros2 node list에 대해 먼저 알아보겠습니다
이 명령어는 현재 실행 중인 Node의 목록을 보여줍니다
한 번 작성해볼까요 ?
ros2 node list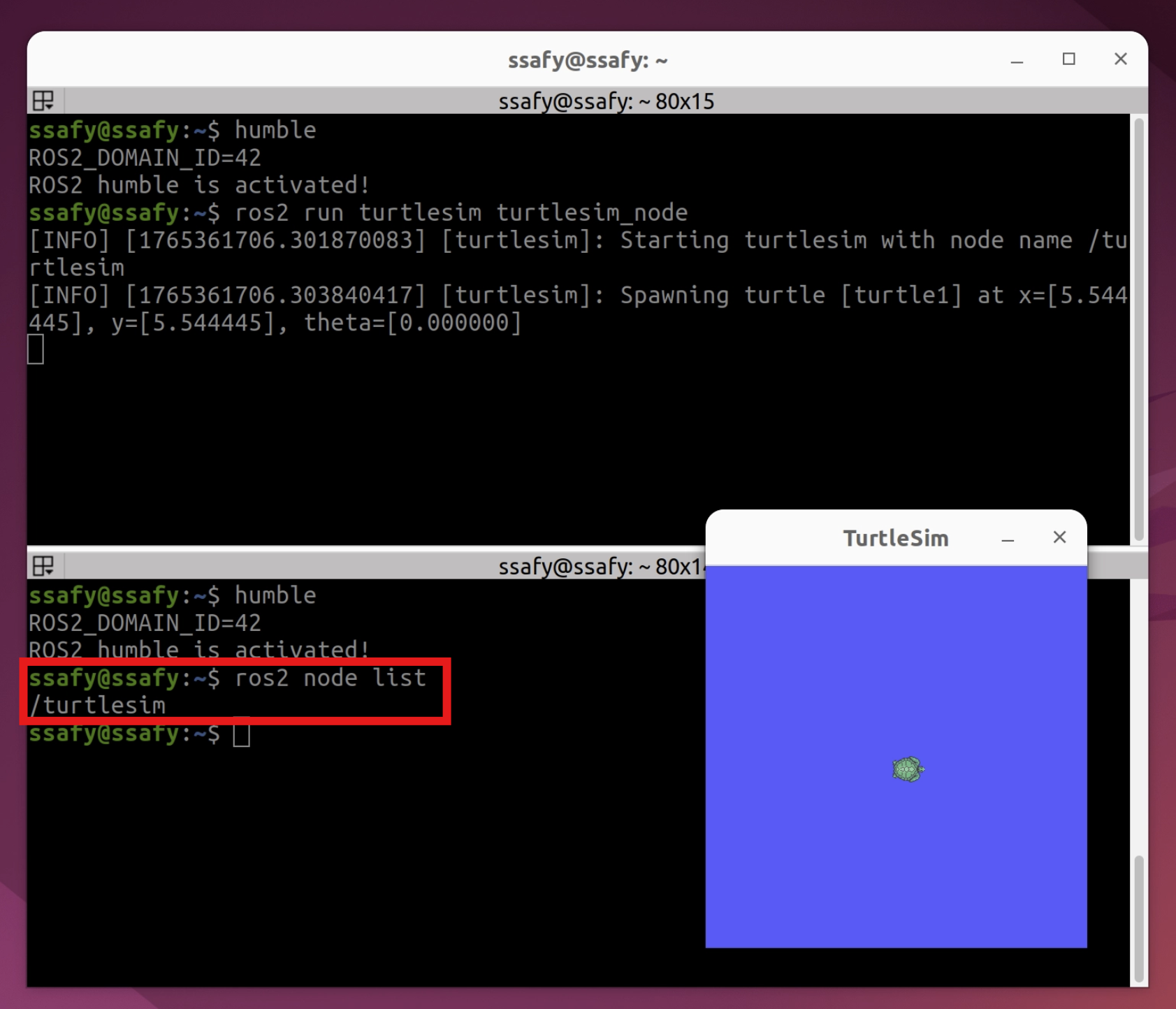
저희는 앞서 “04. Turtlesim & Node (1)”에서 turtlesim_node만 실행했었기 때문에
ros2 node list 실행 결과 /turtlesim만 뜨는 것을 확인할 수 있습니다
다음으로 알아볼 명령어는 ros2 node info /<node name> 입니다
이 명령어는 Node가 어떤 것을 제공해주는지 알려주는 명령어 입니다
ros2 node info /<node name>
/<node name>에는 저희가 ros2 node list 결과로 나온 Node 이름을 써주면 됩니다 (/turtlesim)
한 번 실행해보겠습니다
ros2 node info /turtlesim
🐢 06. 마무리
: 오늘은 Turtlesim과 Node에 대해 살펴보았는데요 😊
최근 공부하고 있는 내용이 많아 ROS 블로그 업로드가 조금 늦어진 점 양해 부탁드립니다
다음 시간에는 ROS2의 기본 명령어인 Service에 대해 알아보겠습니다
그럼 모두 안녕~👋
'Robotics > ROS' 카테고리의 다른 글
| 01. ROS2 Intro (0) | 2025.12.23 |
|---|---|
| 00. ROS2 (0) | 2025.12.13 |